






无需醉心“运算”,研旭SP2000全面升级!
发布时间:
2021-07-02 10:19
来源:
原创

一、 背景
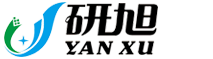
在产品研发前期、算法验证阶段,若采用实际控制器进行控制时,存在周期长、可靠性差等问题。若采用快速控制原型(Rapid Control Prototyping简称RCP),那么就可以高效的、便捷的完成了前期算法的验证。
RCP系统在新能源领域有着巨大的应用潜力,比如光伏变流器、风机变流器、储能变流器等电力电子变换器。只需在MATLAB的Simulink搭建控制算法模型,下载到YXSPACE控制器中,即可实现控制过程。从而开发者可以不用研究任何控制芯片,以及任何嵌入式编程语言,只需要把所有精力放在核心控制算法的研究上面。
南京研旭电气科技有限公司,始终致力于新能源各类产品的研究,也与很多科研院所以及高校建立了深厚的合作关系。多年来积累了很多宝贵的经验,同时也接收很多合作单位的宝贵建议,从而研旭研发出快速控制原型控制器YXSPACE。
YXSPACE-SP2000(以下简称SP2000)采用TI公司的C2000系列DSP-F28xx作为核心控制器。研旭选择此款DSP,正是由于其被广泛应用与各类新能源产品当中。所以SP2000快速控制原型在满足控制需求的情况下,更能贴近实际产品,为开发者提供更为可靠的验证结果。
二、 YXSPACE-SP2000简介
研旭公司推出的YXSPACE产品系列,能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。其基本控制框图如下所示:
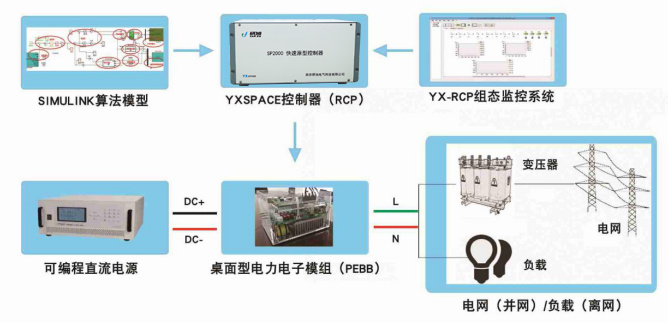
控制算法模型一般采用Matlab中的Simulink工具搭建,将模型中的接口与硬件驱动接口绑定后,再结合TI公司的CCS编译工具产生可执行文件,下载至YXSPACE控制器中运行。
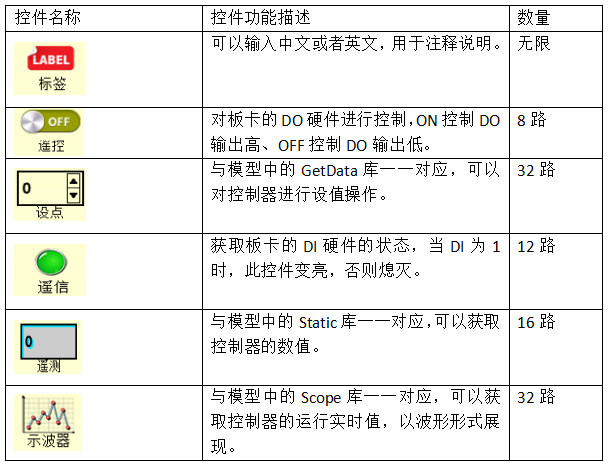
研旭YXSPACE-VIEW2000软件主要用于配置YXSPACE控制器工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。YXSPACE-VIEW2000包括了6类组态控件,分别为遥控控件、遥信控件、遥调控件、遥测控件、示波器控件以及文字编辑控件等。用户可以借助这些控件,直观、方便的搭建监控界面,监控控制器内部运行的详细信息。
三、 SP2000控制器资源
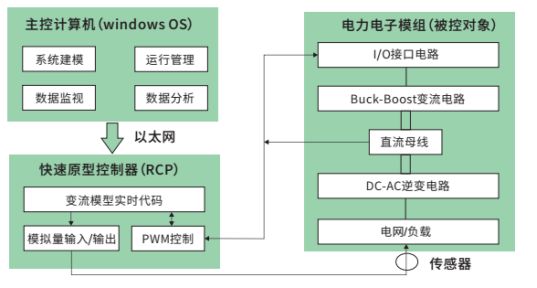
研旭SP2000采用外扩插卡式结构,简洁轻便,板卡资源如下:
下图为YXSPACE的接口图:

四、YXSPACE独特优点
- 采用目前市面成品常用的控制芯片作为CPU,其仿真结果针对实际研究更具有参考性;
- 在Matlab中设计的控制算法自动生成代码,自动加载到实时目标机中运行,避免了繁琐的编程和Debug工作
- 使用门槛低,会Matlab仿真即可完成实验测试工作,所有测试工作只需一人即可完成
- 模型与硬件接口链接简单,只需记住端口编号即可,更不用配置硬件各类细节,免去一切不必要的麻烦;
- 性价比高,在同等功能的前提下,YXSPACE成本更低。
- 具备自主编写的驱动库,可以直接导入到Simulink库中,用户可以直接在Matlab软件中拖动相应的硬件元件库,将模型中的数据直接与硬件对接,无需再花费时间去查询硬件映射。8种库文件,可适用于各种工程调试需求。
- 模型转换文件的透明化,用户可直接查看模型转换后的源码。
五、YXSPACE-VIEW2000 软件
研旭公司专门为SP2000研发了一套上位机监控软件VIEW2000软件。
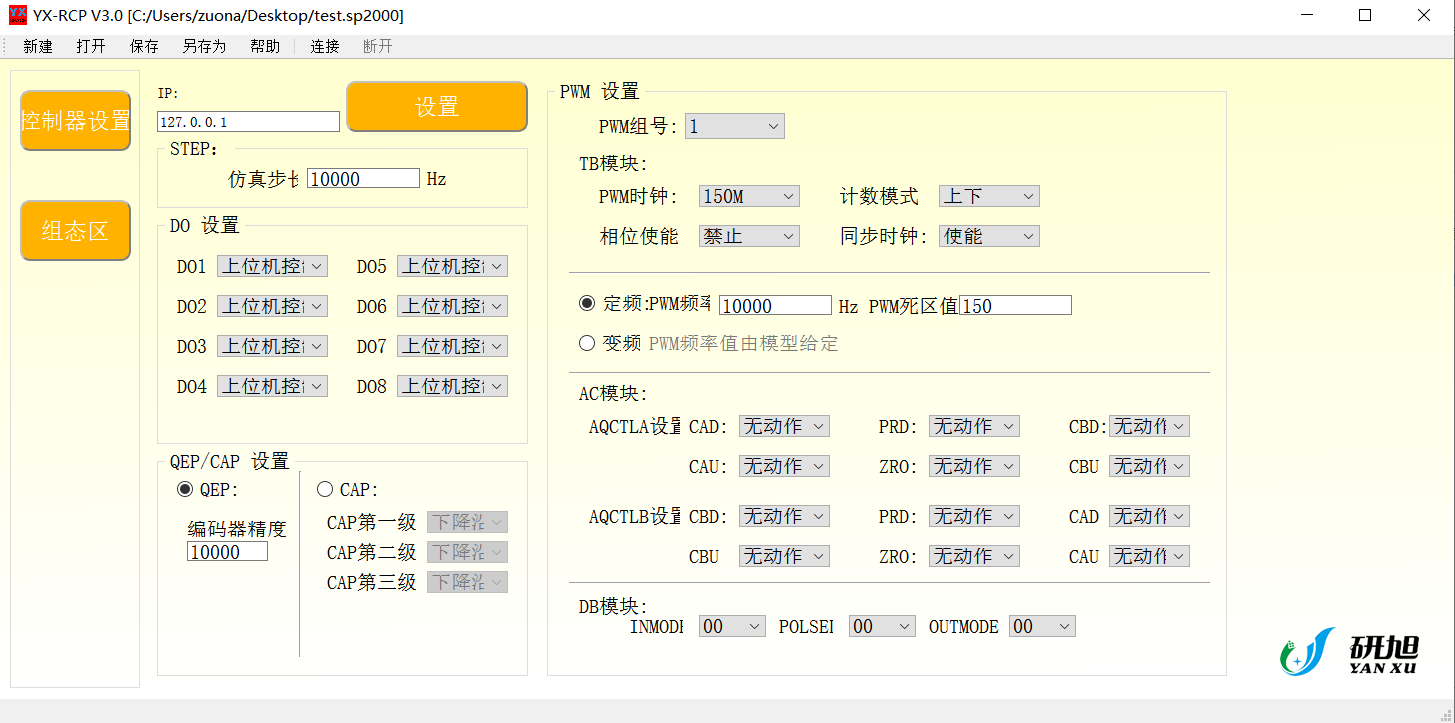
VIEW2000软件中包含控制器设置以及组态区。其中控制器设置界面共有4类控制器设置,包括仿真步长设置,DO控制源设置,QEP/CAP模式设置,PWM模块设置。
组态区主要包括功能按钮、组态控件、工作区等。
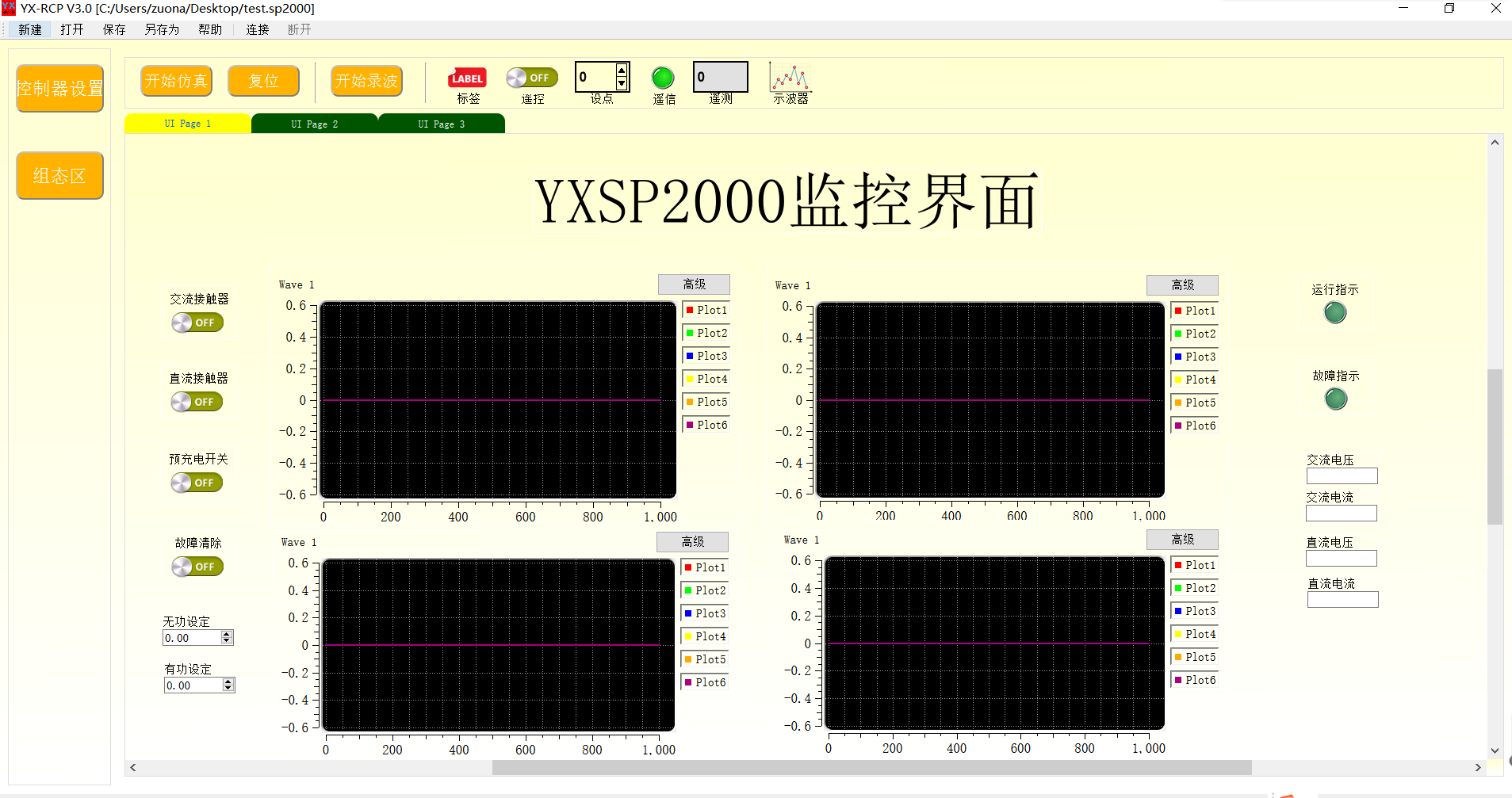
在实际使用中,用户只需用鼠标拖动各类控件,移至工作区当中,位置根据需求随意放置。双击控件即可设置控件的地址号,这样可完成控件与模型或者硬件的建立关系,操作及其简便。
包括如下几类控件:
六、SP2000独有驱动库
研旭自行开发了Simulink驱动库,如下图所示:
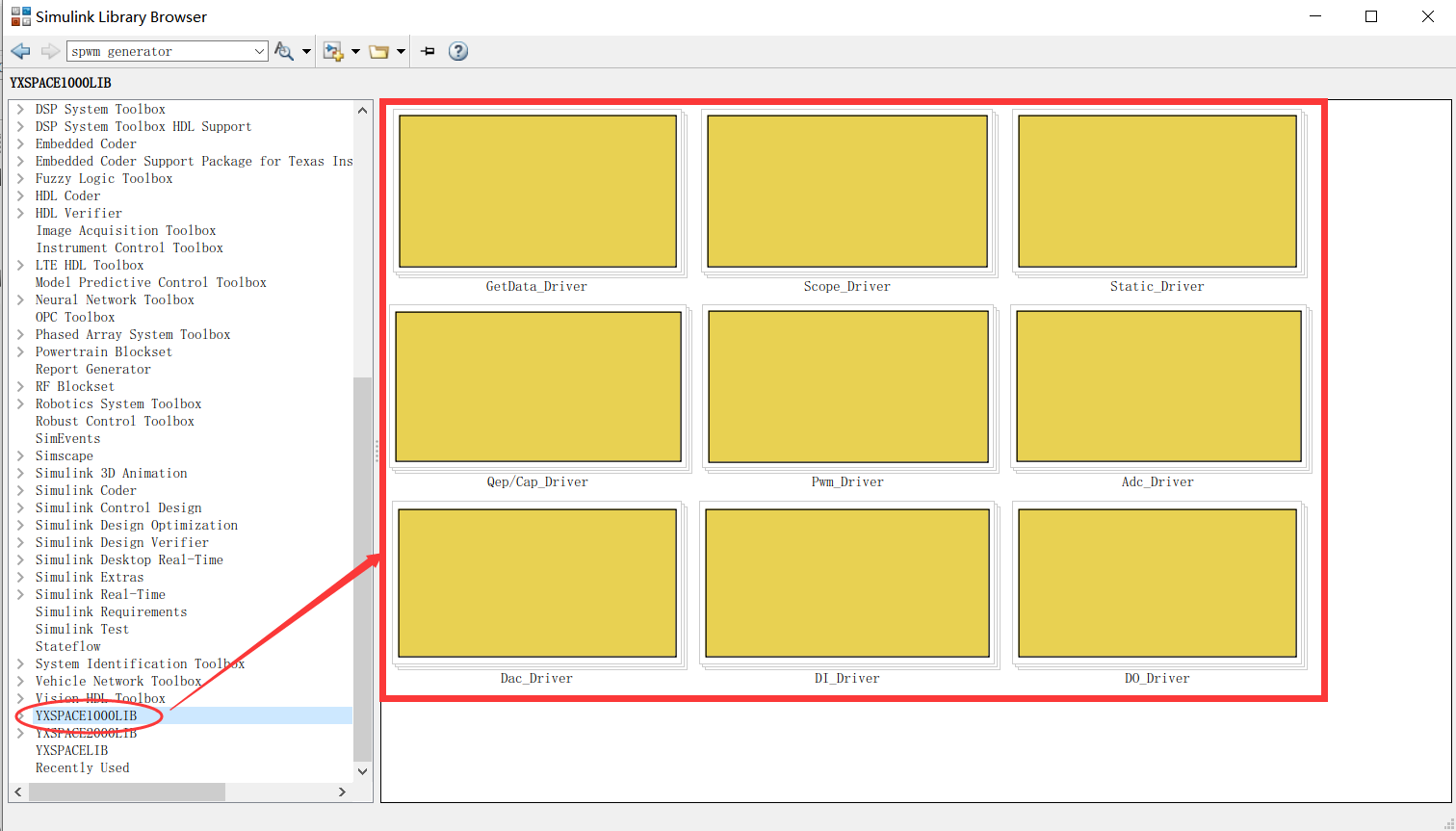
在Simulink的库浏览栏中,添加研旭的驱动库,右侧就可以添加各类驱动支持驱动模块,如ADC模块,DAC模块,DI模块,PWM模块,编码器模块以及示波器模块等。用户通过在模型中调用这些驱动模块,就可以将模型与硬件对应起来。
双击ADC驱动,如下图所示:
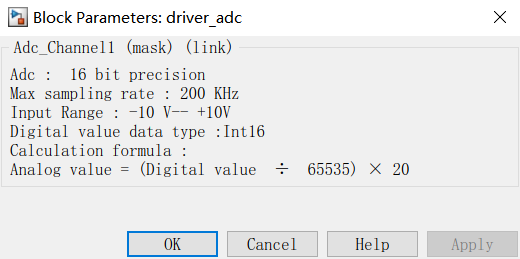
驱动信息为16位精度ADC,最高采样率为200KHz。其中ADC_A_CH1表示ADC的第一通道。每个驱动模块都有唯一的通道号,与硬件接口编号一一对应。
双击PWM驱动如下图所示:
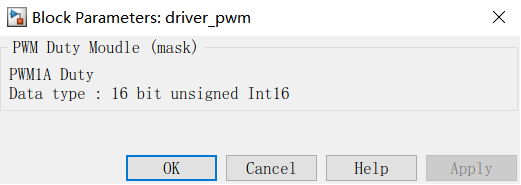
驱动信息为PWM_I的第一通道A的占空比值,数据类型为16位无符号。
双击DAC驱动如下图所示:
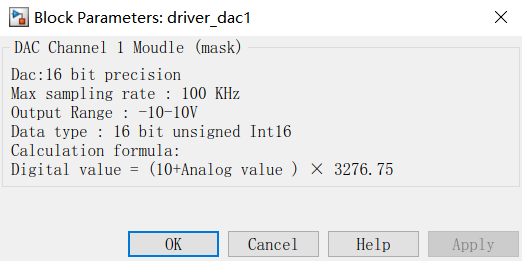
DAC驱动信息为DAC_Channel1第一通道模拟输出,精度为16位,最高输出频率可以达到100Khz,输出范围-10V--+10V。
双击示波器驱动如下图所示:
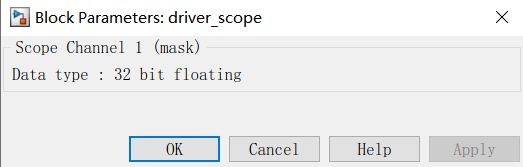
Scope Channel 1表示第一通道示波器,与VIEW2000软件的示波器控件波一一对应。
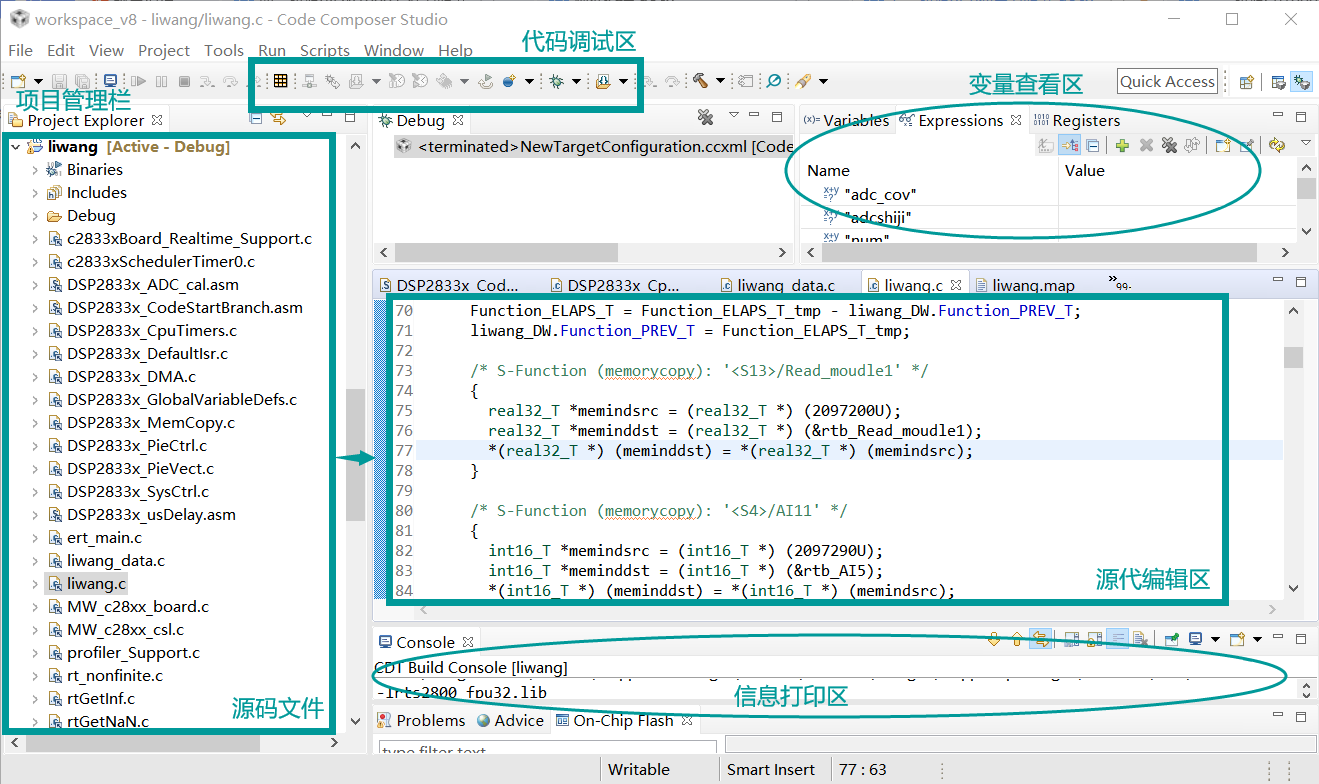
七、模型源代码
在实际应用中,很多用户会提及,模型转换的文件是否透明?是否可以查看最终的源代码?答案是肯定的,用户可以查看、编辑转换后源代码,换句话说simulink内部自带的算法模块,可以透明的转换成源代码呈现在用户面前。
在模型开发的第一阶段,往往更加关注控制功能的实现,一旦功能实现后,接下来根据需要进行第二阶段,即模型优化阶段。但是模型的优化依据,往往需要查看模型转换的源代码。此时需要借助TI公司提供的Code Composer Studio开发环境,简称CCS,通过CCS软件导入模型转换工程,查看产生的源码文件、内存分配文件等,让用户更深了解到转换底层的信息。只有这样用户才能完成更佳的模型优化,甚至是产品级的代码优化。
具体导入工程的界面如下所示:在CCS环境下,用户可以方便的查看模型转换的源文件,源代码,内存配置等信息。对于反过来的模型优化具有参考意义。当然通过此环境,用户也可以直接进行代码修改,实现代码级优化,而且可以直接下载、调试,为产品级代码开发提供了条件。
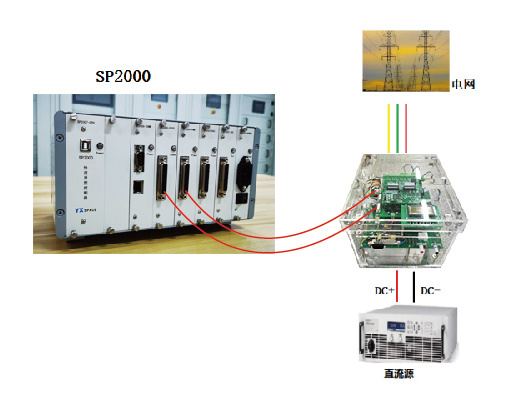
八、SP2000实际案例
并网逆变器案例,控制器采用SP2000,功率转换采用三相全桥电路。如下图示意图所示:
Simulink模型搭建如下:
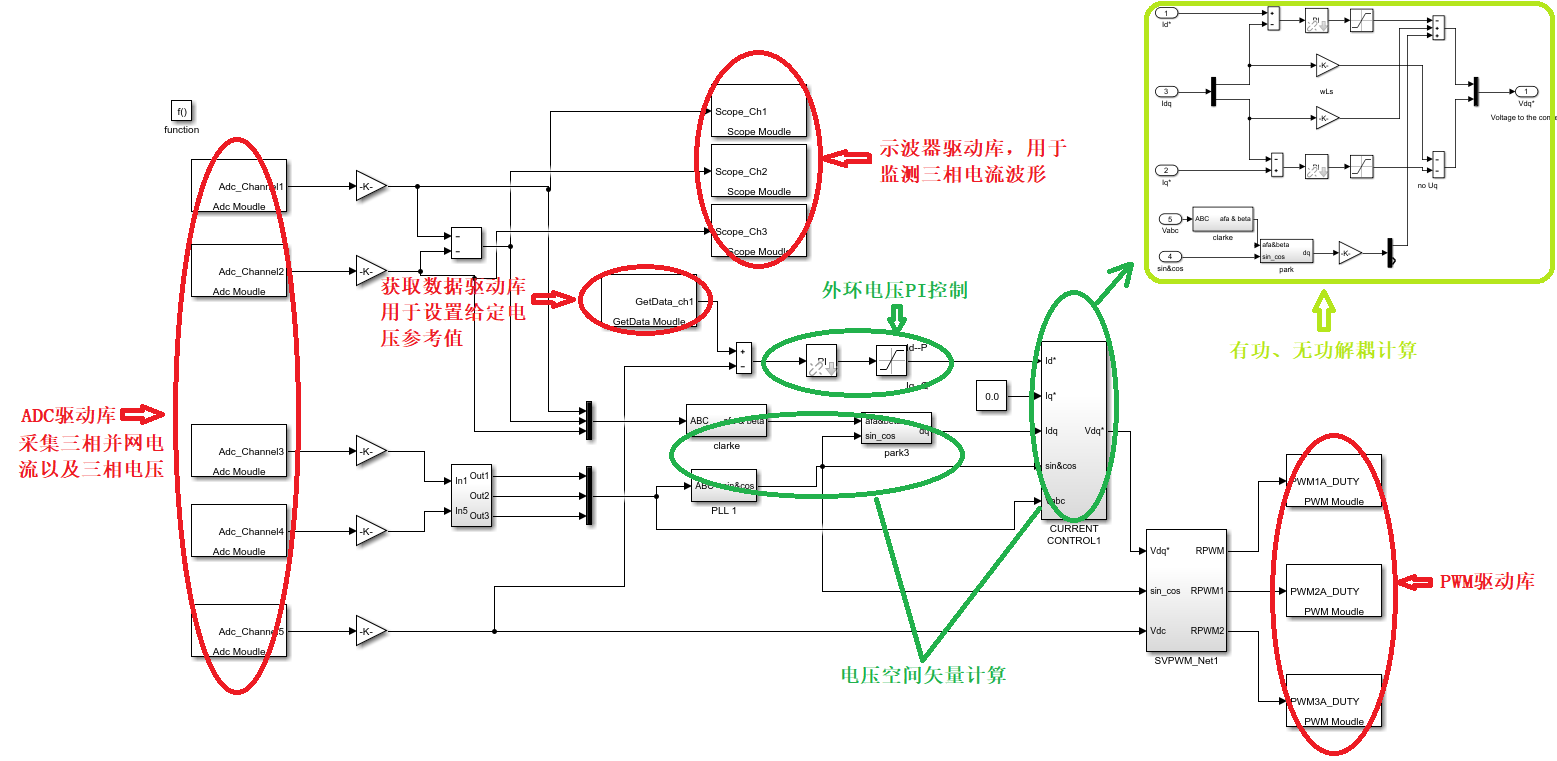
采用电压空间矢量控制算法,采集三相电网电压、三相并网电流,直流电压、直流电流等模拟量,进行有功、无功解耦,外环控制电压、内环控制电流,最终计算输出3组互补对称SVPWM波形,驱动开关器件,从而实现并网逆变器功能。
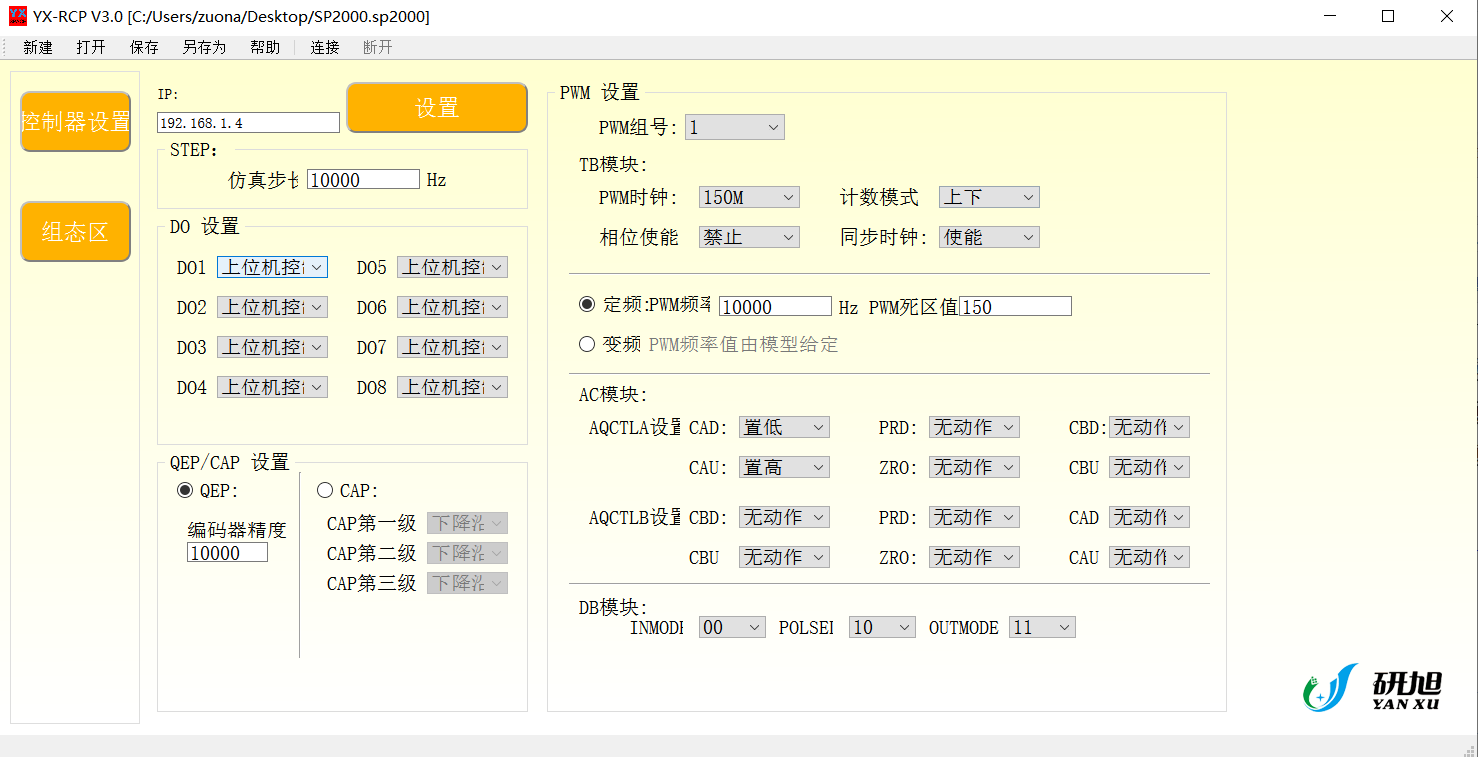
通过SP2000软件配置控制器为控制步长10KHz,PWM模式为互补对称模式,死区1us等,如下图所示设置界面:
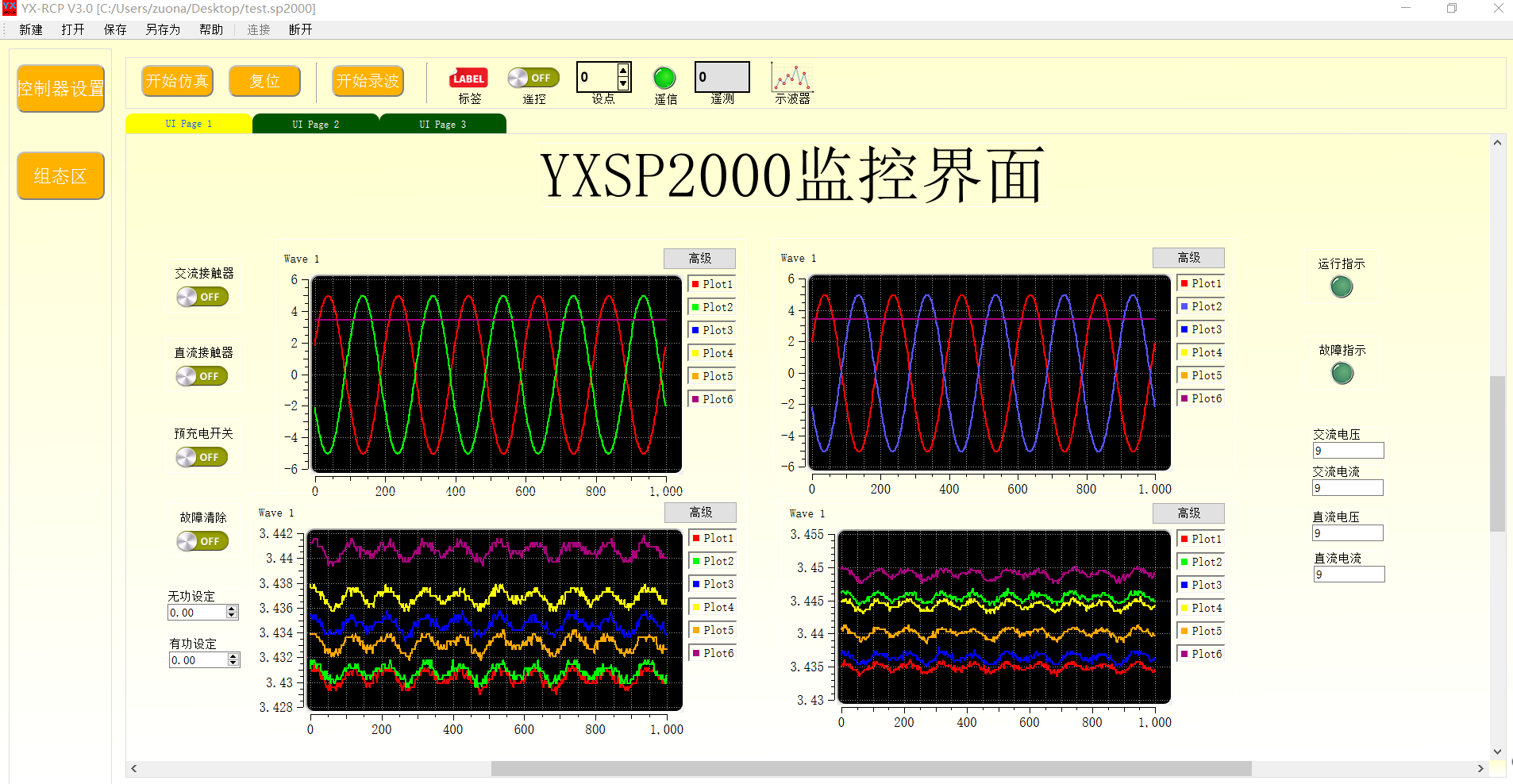
然后在VIEW2000软件通过示波器控件可以监控到电压电压波形、并网电流波形、直流电压和直流电流波形,同时可以通过遥调控件告知模型控制有功、无功值等,如下界面所示。
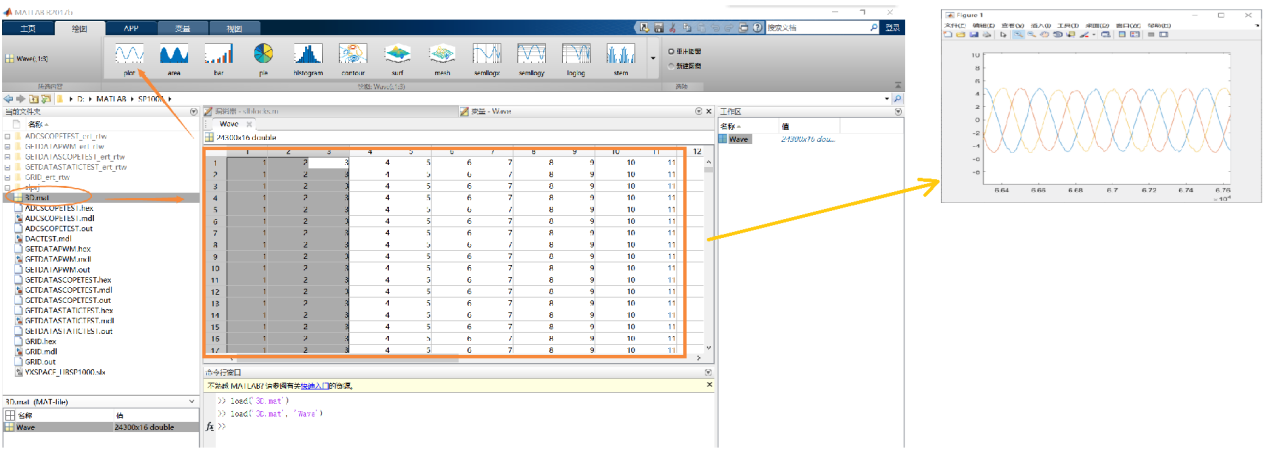
通过录波功能,将实验过程的数据可以保存下来, 利用MATLAB的plot描点工具,将原始数据以图形形式展现出来,如下图所示三相并网电流波,然后通过plot内部自带的缩放、扩放等工具,可以对数据进行更加深入的分析。
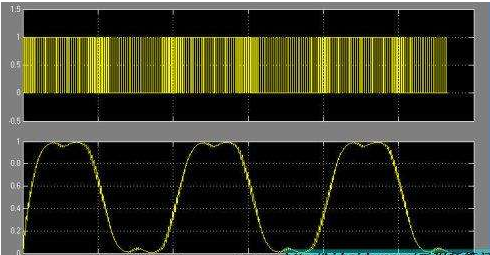
若用户想将模型内部关键节点数据采用模拟量方式输出时,此时只需要调用SP2000的DAC模块驱动,然后通过实际示波器测量DAC接口即可。下面是将占空比与PWM信号同时测量的示波器屏幕截图,1通道为PWM实际输出波形,2通道为模拟量输出的占空比波形。
相关新闻
恭贺研旭YX-PMP2000电机控制快速原型开发集成平台助力【东北石油大学】张老师团队发表高质量SCI论文
在永磁同步电机(PMSM)的矢量控制中,需要解决速度过冲和转矩脉动现象。电动汽车(EV)中 PMSM 的驱动控制有两个前提条件。第一是必须确保车辆的整体控制,第二是在保证电机稳定控制的同时,确保车辆控制的经济性。因此,本文首先提出了模糊分数阶指数收敛律滑模控制(F-CFSMC),它是以在线修正分数阶滑模面的指数收敛律为目的而构建的。它用参数明确表达了分数阶滑模面的到达时间和收敛速度。利用Lyapunov方程证明了 F-CFSMC 的稳定性。F-CFSMC 适用于具有不同参数的PMSM。接下来,引入了考虑电动汽车电池参数因素的模糊控制器,将锂电池和PMSM结合起来,以提高能量利用率。至此,双层次模糊分数阶指数收敛律滑动模式控制(DF-CFSMC)构建完成。此外,还使用 DF-CFSMC 和传统 PMSM 控制进行了比较仿真和实验,并在 PMSM 分层中得到了结果。在电动汽车分层应用中也进行了仿真,以显示 DF-CFSMC 的通用性、可重复性和优势。
研旭YXSPACE系列产品助力集美大学轮机工程学院发表优质论文:科技与学术的完美结合
[1] 论文名称:混合动力船舶直流微电网阻抗建模、参数灵敏度及稳定性分析 [2] 期刊名称:Electric Power Systems Research
微信公众号





